發布日期:2022-10-09 點擊率:114
引言
在動平衡機測試領域,數據采集采用的是單片機或計算機和數據采集卡的方式。采用單片機和計算機需要具備電子專業知識和上位機編程能力,隨著PLC技術的不斷發展,在PLC內也可以增加腳本程序,這樣就具有了強大的靈活性和擴展性,并且PLC控制電機相對簡捷,因此本文選用基恩士PLC。對于單片機控制電機不僅需要自己編寫控制電機的加速和減速程序,還需要編寫電機定速和定長程序,對于計算機則需要使用運動控制卡來控制電機。
另外,隨著PLC的發展,PLC可以外接很多模塊,例如AD模塊、運動模塊、Io模塊等,并且AD模塊采樣頻率和精度越來越高,程序越來越簡捷。
基于KEYENCEPLC的電機轉子動平衡測試系統,其開發原因首先是PLC可以寫腳本程序,這樣數據的分析和處理就可以直接在PLC上完成,再就是PLC可以外接AD模塊,這樣就可以實現數據采集工作。另外,目前計算機版本的電機轉子動平衡測試系統構成部分過多,windows系統文件的損壞會導致后期維修成本過高,影響產品質量,而基于PLC的電機轉子動平衡測試系統軟件相對簡單,為后期維護升級提供了方便,并且二者成本相差不大。
1系統總體結構和工作原理
1.1系統總體結構
如圖1所示,動平衡測試系統由基恩士PLC和AD模塊、工業組態屏、濾波板、測試擺架、電機和驅動器(步進電機或伺服電機)組成。測試擺架用于支撐電機轉子并將電機轉子旋轉過程中的離心力傳送給傳感器,工業組態屏用于界面顯示、數據輸入、數據存儲等,為提高測量精度而專門設計了高精度濾波板,步進電機或伺服電機通過皮帶驅動電機轉子旋轉。

圖1系統結構圖
1.2主要原理
電機轉子放置在測試擺架上,步進電機或伺服電機通過皮帶驅動電機轉子旋轉,在轉子旋轉過程中產生的離心力作用到擺架上,并傳送到傳感器上,傳感器將位移量轉換為電信號,電信號再通過AD模塊轉換成數字信號。PLC采集這些信號后,經過數據分析和處理,計算出動不平衡的量值和角度,PLC再將數據通過串口通信發送到工業屏上顯示出來,PLC根據角度值控制電機來進行定位[2]。
設計的實際局部電路布局圖如圖2所示。
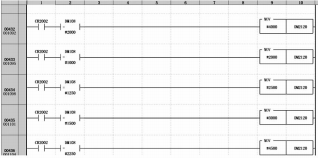
圖2電路布局圖
動平衡數據流向簡介:工件旋轉產生的離心力二擺架二傳感器二傳感器的模擬信號二濾波板二AD模塊LPLC采集計算L觸摸屏顯示。
1.3系統測量內容
系統主要測試電機轉子的雙面動不平衡量和角度,根據數據對電機轉子進行加重或去重修正,使電機轉子動不平衡量降低到合格范圍。主要測試項目如圖3所示,包括左側動不平衡量及角度、右側動不平衡量及角度、合成值及角度計算、槽差和角度差計算。
2數據采集的實現
2.1濾波板的設計
設計主要思路:采集數據需要在一定頻率下進行,這樣能夠保證數據的穩定性和真實性:需要選定相適應的濾波芯片:合理設計信號放大電路:選定AD模塊。
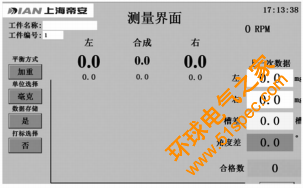
圖3測量界面
(1)采樣多個4位二進制同步可逆計數器M74HC193BIR進行分頻,如圖4所示,將4MHz的晶振分頻到需要的采樣頻率,例如工件轉速2000r/min,則將4MHz分頻到3.33Hz(說明:濾波芯片需要的頻率是實際頻率的1/10)。
(2)信號放大后進入到濾波芯片LTC1060,如圖5所示。
LTC1060包含兩個高性能的開關電容濾波器,每個濾波器連同2~5個電阻器能夠實現各種不同的二階濾波器功能,例如低通、帶通、高通陷波和全通。這些濾波器的中心頻率可由內部電阻比和一個外部時鐘來調諧。高達4階的全雙二階濾波功能可通過級聯兩個濾波器部件來實現,可以形成任何經典的濾波器配置,比如:巴特沃斯(Butterworth)、切比雪夫(Chebyshev)、貝塞爾(Bessel)、橢圓(Cauer)。
LTC1060采用單電源或±(2.37~8)V的雙電源供電運行。當使用低電源(即單5V電源)時,濾波器通常消耗12mP功率,并能采用高達10wHz中心頻率工作。當采用±5V電源時,頻率范圍擴展至30wHz,而且還能獲得非常高的O值。

圖4分頻電路
圖5濾波芯片周圍電路
LTC1060采用凌力爾特的先進LTCMosTM硅柵工藝制造,因此獲得了低偏移、高動態范圍、高中心頻率O乘積和卓越的溫度穩定性
)3)信號濾波后再進行一次放大,然后進入AD模塊,如圖6所示
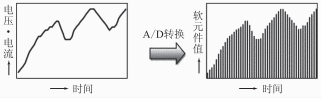
圖6AD模塊內部轉換
1)模擬轉換單元內部,對載入的模擬信號實施數字轉換,作為數值自動存儲到PLC軟元件。另外,無須單位轉換的梯形圖程序,便可將載入的值轉換為任意值)定標)。
2)可以進行溫度漂移修正,確保所采集數據的真實性和準確性。
2.2某一頻率采集的實現
(1)首先需要一個可設置的頻率輸出使用PLC高速計數器作為脈沖輸出,并把需要輸出的頻率設置在一個軟元件內,采用指令PLsoUT。
(2)將脈沖輸出點接入到中斷輸入請求。當來一個脈沖后中斷請求,PLC停止掃描直接進入到中斷程序,在中斷中只運行讀取數據,這樣就可以實現對信號的定頻采集。
(3)將中斷輸入設置為高速輸入,如圖7所示。
(4)根據參數設置輸出頻率,如圖8所示。
(5)使用高速計數器實現脈沖輸出,如圖9所示。
(6)中斷采樣程序如圖10所示。

圖7高速輸入設置
圖8輸出頻率設置

圖9脈沖輸出指令
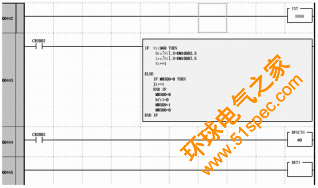
圖10中斷采樣指令
2.3旋轉中電機轉子原點記憶的實現
(1)電機轉子沒有槽時,則在轉子上人為畫一個記號,使用光電傳感器在轉子旋轉過程中記錄這個記號,并把傳感器的信號接入到PLC的輸入,由于這個記號是人為畫上去的,即便是PLC在中斷程序中這個記號也不會丟失。
(2)電機轉子有槽時,則需要記錄轉子的槽數,可以將轉子啟動時第一個脈沖來時(從沒有槽到有槽)記錄為第一個槽,再一個脈沖來時記錄為第二個槽,依次類推,一直到轉子對應的槽數即為轉子旋轉一周,在轉子連續旋轉時只需每個槽對應一個數字(當前槽數),一直連續記錄,這樣原點可以指定任何一個槽,如圖11所示。
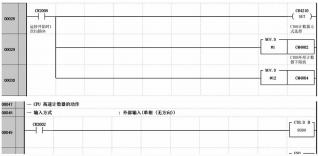
圖11高速計數器設置
3電機轉子旋轉及自動定位的實現
3.1電機轉子旋轉的實現
(1)可以通過設置定位參數來實現電機的旋轉和加減速控制,如圖12所示。

圖12電機參數設置
(2)可以通過程序來設置電機的加減速和轉速,如圖13所示。
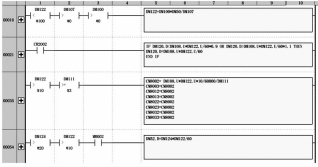
圖13運動參數設置
(3)工件從速度0加速到設置轉速,如圖14所示。
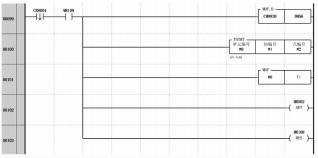
圖14電機旋轉指令
(4)工件運動中的換速如圖15所示。
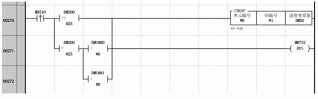
圖15電機換速指令
(5)工件從運動中到停止,采用的是先從高速換速到低速,再執行停止指令。在這里使用的是緊急停止,沒有用減速停止,原因是減速停止時給出指令后工件還會旋轉一定位置,對自動定位功能來說會產生一定位置的偏差。
3.2電機轉子定位的實現
對于有槽的轉子來說,通過高速計數器可以記錄轉子的當前槽數,這樣就可以將任意一個槽作為原點。為什么要找個原點呢?第一,數據采樣時起始位置可以確定,連續多次采樣時起始位置確定后,每個數據對應轉子的位置就確定了:第二,測量數據計算出的動不平衡量的角度也是相對于原點計算的:第三,轉子只有先知道原點,才能根據測量的角度換算成電機控制脈沖來實現自動定位。
(1)使用PLC的高速計數器記錄轉子的當前槽。設置高速計數器參數,包括計數器循環計數范圍,例如轉子是12槽,則計數器從1計數到12然后再從1開始計數:還包括高速計數器的記錄方式,是使用內部時鐘還是使用外部信號,內部時鐘包括50ns、1us、10us、100us,外部信號最好設置為高速信號,設置完成后高速計數器可以不受PLC掃描周期的影響,自行循環計數,這樣轉子在旋轉過程中,只要讀取當前槽數就可以知道轉子旋轉到哪個位置,不論對轉子是做加速、減速還是換速動作都不影響高速計數器的記錄。
(2)自動定位是根據測量數據將轉子的動不平衡量定位到指定位置,這就需要將測量的角度轉換成驅動電機的脈沖,之前的思路是首先計算出電機轉子旋轉一周步進電機或伺服電機所需要的脈沖數,然后將電機轉子從高速換到低速,找到原點信號,再根據測量角度換算成脈沖數,隨后檢測步進電機或伺服電機是否完成這些脈沖,最后停止旋轉。之前的問題在于當找到原點信號后檢測步進電機或伺服電機脈沖數時如果電機轉子打滑,則最終定位的位置可能是錯誤的。目前的思路是先根據測量的角度換算得到這個角度是在哪個槽內,將電機轉子從高速換到低速后再去尋找這個槽。例如,電機轉子為12槽時,剛到第一個槽時為09,剛到第二個槽時為309,依次類推。當測量角度為32.49時,則只需要先找到第二個槽,然后將2.49轉換為步進電機或伺服電機的脈沖數,再檢測脈沖、停運電機,相比之前的方式,此種定位方法的準確性要高很多。
(3)自動定位是對減速停止和緊急停止的選擇,在初期采用的是減速停止,在加減速時間確定、工作轉速及低速轉速確定后減速停止的方案是可行的,但是有一定的局限性,因為參數設定好后減速停止指令執行時,電機轉子從指令發出到完全停止所旋轉過的位置是個定值,當用戶更改加減速時間或低速轉速后,這種停止方式就有一定的定位誤差,需要重新校正。使用緊急停止方式則可解決上述問題,但是需要進行報警清除,因為PLC認為緊急停止是出現了某種錯誤狀況,所以需要每次啟動前清除報警。
4動平衡測試系統的測試
4.l采集數據對比
計算機版本的轉子測量數據如圖16所示。
圖l6計算機版本轉子測量數據
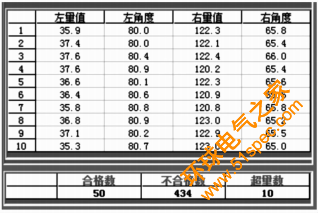
PLC版本的轉子測量數據如圖17所示。

圖17PLC版本轉子測量數據
4.2測試結果分析
(1)高精度濾波板和AD模塊的使用,使數據重復性從原來的±3mg降低到目前的±1mg。
(2)更改加減速時間或低速轉速后自動定位時位置不變,更加簡化了操作。
(3)設備維修率大幅降低,計算機版本的動平衡測試系統由計算機、數據采集卡、運動控制卡、濾波板等組成,不穩定因素相對較多,例如計算機系統、計算機主板、CPU、內存、硬盤等等。而PLC版本的動平衡測試系統僅由PLC和濾波板組成。
5結語
本系統是基于KEYENCEPLC實現對電機轉子動不平衡量和角度的測量,測量數據的重復性、自動定位重復性都大幅提高,操作更加簡潔。另外,由于系統穩定性的提高,售后維修費用大幅降低,產量也有所提高。
下一篇: PLC、DCS、FCS三大控
上一篇: 一種油色譜在線監測裝


