發布日期:2022-08-21 點擊率:71
自適應前照燈系統(AdaptiveFront-lightingSystern,AFS)是使近光燈光軸在水平方向上與轉向盤轉角聯動進行左右轉動,在垂直方向上與車高聯動進行上下擺動的燈光隨動系統。它使得近光燈的照射光線能轉向車輛的前進方向,在夜間行駛時,前方的交叉路口、彎道處的可視性能得到提高,能夠有效地降低駕駛員在夜晚彎路上行車的疲勞程度,使駕駛者能夠看清轉彎處的實際路況,進而有充分的時間來應付緊急情況,從而明顯提升夜晚彎路上行車的安全性。
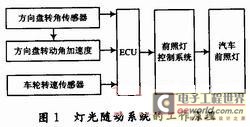
1汽車燈光隨動系統的工作原理
汽車燈光隨動系統的工作原理如圖1所示。汽車燈光隨動系統共由四部分組成:傳感器、ECU、車燈控制系統和前照燈。汽車車速傳感器和方向盤轉角傳感器不斷地把檢測到的信號傳遞給ECU,ECU根據傳感器檢測到的信號進行處理,把處理完后的數據進行判斷,輸出前照燈轉角指令,使前照燈轉過相應的角度。
汽車在轉彎時,重點是要提前看到所轉方向的障礙物,根據現實駕駛的經驗,車燈一般只需轉過O~15°即可,只需要所轉方向側的那只前照燈實現智能轉向就可,另一側前照燈還是保持原來的方向。雖簡化了控制,仍然能夠達到預期的效果。
2模糊控制系統的組成和實現過程
一個模糊控制系統必須包含一些必要的部件。模糊控制屬于計算機數字控制的一種形式,它的組成類似于一般的數字控制系統,如圖2所示。
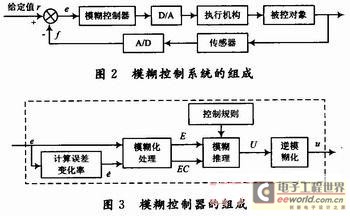
模糊控制器的組成如圖3所示,它主要包括輸入量的模糊化、模糊推理和逆模糊化(或稱模糊判決)三部分。模糊控制器的實現可由模糊控制通用芯片實現或由計算機(或微處理機)的程序來實現。
3燈光隨動系統模糊控制器設計原理
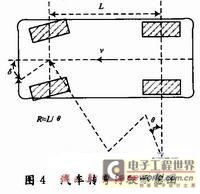
如圖4所示:當汽車轉過很小的角度時,其轉動半徑R近似地等于L和轉動角度δ的比值,通過車速傳感器的數據很容易計算出行駛的距離L,通過方向盤傳感器檢測到的信號也容易得出δ的值,這樣就很容易求出轉動半徑R的值。而且,根據實際經驗可知,燈的轉向和汽車行駛的半徑R的關系最大。因此,可根據R值的變化對汽車車燈的轉向進行模糊控制。首先定義R,如果為正值,說明為逆時針轉動,負值為順時針轉動;另外定義θ為正,說明為左邊燈向左轉動度數,負值為右邊燈向右轉動度數。
4汽車燈光隨動系統仿真及結果
本系統的模糊設計器采用Matlab模糊工具箱設計模糊控制器。
在Madab中鍵入FUZZY,進入模糊邏輯編輯窗口FISEditor,如圖5所示。可以對輸入和輸出的隸屬函數進行編輯。
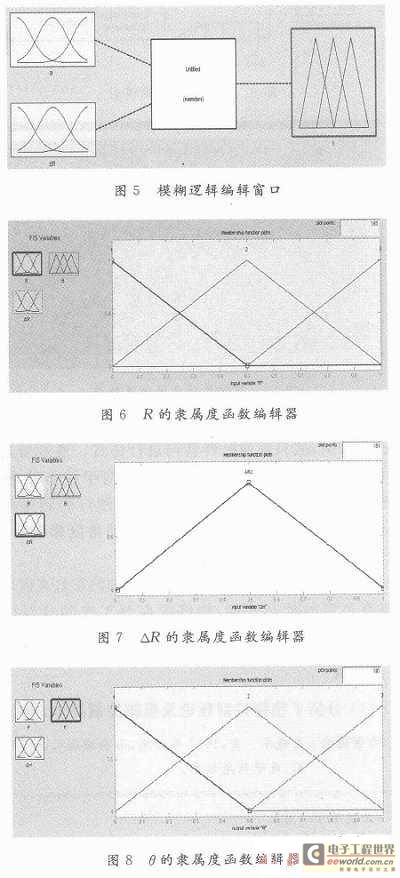
如圖6所示,R的論域為[0,1],有三個語言變量,三角形隸屬度函數。
如圖7所示,△R的論域為[0,1],有一個語言變量,三角形隸屬度函數。
如圖8所示,輸出θ的論域為[O,1],有三個語言變量,三角形隸屬度函數。
在RulersEditor窗口中輸入控制前照燈轉向的3條模糊控制規則:

5仿真結果與分析
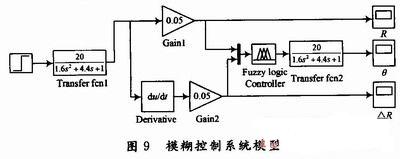
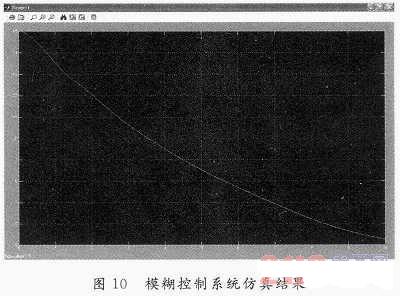
為了準確建立系統模型和進行仿真分析,通常的工業過程可以等效成二階系統,不失一般性,取G(s)=作為汽車燈光隨動系統的模型。在Matlab中建立的模糊控制系統模型如圖9所示,基于實際經驗以及量化因子和比例因子的選取規則,經過仔細選擇,取K1=0.05,K2=0.25,K3=1,仿真結果如圖10所示。
本文中,由于汽車的順時針和逆時針的轉向時的控制道理相同,故只對逆時針轉向進行仿真。通過仿真結果可以看出,基本符合預期,在汽車轉彎半徑小時,前照燈的轉向角度大,在轉彎半徑大時,前照燈的轉彎角度小,而半徑的變化率△R對前照燈轉動角度影響小些,△R增大,前照燈的轉過角度較小。
通過仿真可以看出,基于模糊控制的汽車燈光隨動系統具有良好的動態性能,能夠提高汽車夜間行駛的安全性。
6結語
(1)分析了模糊控制理論及模糊控制技術,進行汽車燈光隨動系統設計,并根據汽車轉彎行駛時的實際路況找出兩個關鍵可控參數,即汽車行駛速度和方向盤轉角,把這兩個控制參數通過模糊控制方法轉為對汽車行駛半徑一個變量的控制,使控制結構簡化,以達到較好的控制效果。
(2)用Matlab軟件對模糊控制系統進行了仿真,仿真結果表明設計的合理性和方案的可行性。
通過仿真可以觀察到,基于模糊控制的燈光隨動系統可以實現汽車前照燈的智能轉彎,能使汽車夜間行駛的安全性大大提高,降低了駕駛員的勞動強度,且結構設計簡單、實時性強、可靠性高、易于實現。
下一篇: PLC、DCS、FCS三大控
上一篇: 基于虛擬儀器的鐵軌損

型號:ML200PS1PC
價格:面議
庫存:10
訂貨號:ML200PS1PC

型號:ABH200PSC1B
價格:面議
庫存:10
訂貨號:ABH200PSC1B

型號:GLGD12D
價格:面議
庫存:10
訂貨號:GLGD12D

型號:19C003PG1K
價格:¥8000
庫存:10
訂貨號:19C003PG1K

型號:13C0500PA1K
價格:¥5500
庫存:10
訂貨號:13C0500PA1K

型號:SPT4V5000PS5W10
價格:¥7500
庫存:10
訂貨號:SPT4V5000PS5W10


