發布日期:2022-08-21 點擊率:101
1. 簡介
醫學量度工程上發展觸覺傳感器,可以輔助量測人體生理訊號的變動。肌肉骨胳之間失調、神經末稍病變、脈搏、脊髓傷害、關節炎和皮膚組織病變等,都可以藉由觸覺傳感器量測人體物理量變化,協助醫療上診斷。對于手足傷殘病患而言,觸覺傳感器可以量測手部力量變化,可以幫助評估病患手部功能及輔助手部復健工作[1]-[3];外科技術方面,可藉由觸覺傳感器評估替換后的人工關節及肌腱調換后復健狀態[4];血壓量測及薄膜組織病變癌癥腫塊也可以利用觸覺傳感器來檢查人體異狀[5]-[6];醫療補助復健器材方面,觸覺傳感器也應用于義肢及輪椅等輔具上,協助病人行動及減輕不適[7],由于觸覺傳感器于醫療上廣泛應用需求,近年來許多以硅微加工制作(Micro-Fabrication)觸覺傳感器已經相繼開發,如光學、壓電、壓阻和超音波等。
觸覺傳感器依型態分類,可分為接觸式及非接觸式兩種形式觸覺傳感器,所謂接觸指的是傳感器與人體之間接觸;壓阻、電容及壓電式觸覺傳感器屬于接觸式,光學與超音波觸覺傳感器屬于非接觸式。本研究針對接觸式觸覺傳感器,開發一套可以評估觸覺傳感器特性之微力量測校準系統,系統可以仿真人體力量變化,提供正向力或側向剪力之動態施力,完成接觸式觸覺傳感器驗證工作,同時也可以于人體直接量測,與觸覺傳感器施力測試相互驗證。
2. 系統描述
本研究接觸力量測機構設計如圖1 所示,允許接觸力的量測范圍可由數亳克至一仟克,探針接觸的可調間隙范圍從0μm 到40μm。此機構主要由二個部分組成,其一為致動量測單元,含壓電致動器、荷重元和探針;另一為可調三維之定位機構,含 XY與Z 軸精密位移計、角度盤、高度規和底部基座等。在直接量測接觸力的情形下,如何適切作接觸的特性量測是本系統的首要考量,不良的力接觸過程,除了造成量測的誤差外,亦可能破壞待測組件。本系統以壓電伸縮原理作接觸方法量測,利用壓電致動控制探針施力。此壓電致動比起一般使用精密位移計來帶動施力的基本方法,存在數優點,首先,壓電伸縮產生的精密位移,可以提高施力范圍精度到達毫克的變化。次之,壓電伸縮精度于微米下移動時,可準確施加微力帶動探針做直接接觸量測,充分降低探針與芯片不良接觸過程,進而影響改善微力之量測特性。同時兼具保護微傳感器功能,避免過大的施力造成微組件損壞。最后,可控制壓電致動器產生周期性切換,可對觸覺傳感器作動態施力量測。微力變化的量測部分設計,采用高分辨率之荷重元(SENSOTEC MODEL 34)作為力的轉換單元,此荷重元的規格精度達到毫克,并具有零點校正功能,當在荷重元前端裝置探針,可以減去探針的重量,量測到實際壓電致動施力于感測晶粒的微力變化,施加作用力于觸覺傳感器上之作用點,則設計點力探針實現。
受限于觸覺傳感器微小化限制,機構設計相對需要更高精密度機構組件才能達到探針與觸覺傳感器對位的要求。測量機以高倍顯微鏡或雷射光點,完成針尖與力微傳感器之接觸面中心對準的動作;藉由控制三軸平臺位移,達到對位的要求;水平軸對位以精度10μm X-Y 平臺,調整探針與觸覺傳感器接觸面的中心準位點。垂直軸下針的動作,以精度1μm 分厘卡頭,完成針尖與觸覺傳感器接觸面間的最小預力接觸量測。于X-Y 平臺底部加入可旋轉角度臺,做為觸覺傳感器的正向力與側向剪力量測機制,角度臺最小的旋轉刻度為1 度角,最大傾斜角左右各60 度。
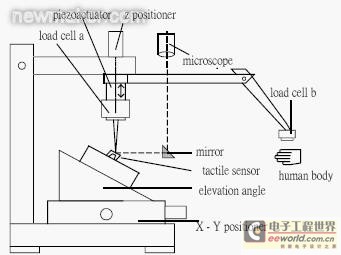
圖1. 力微感測組件測量機構
在致動器上端加上支架,延伸出可屈折探棒機構,并在探棒前端加上另一荷重元,可以直接使用于人體量測;如此,當組件測量機構施力量測時,可同時帶動探棒施力。觸覺傳感器量測過程中,可由A、B 兩組由荷重元量測施力值比較,了解機構所測試觸覺傳感器與直接人體量測時,兩者間差異,作為觸覺傳感器校正依據,因此,系統將同時擁有測試觸覺傳感器與及臨床校準觸覺芯片的功能。
本感測量測系統設置方塊圖與實體圖,如圖2所示,系統的組成單元包含施力量測機構、訊號處理、電子電路設計、人機接口、資料擷取與資料分析。當探針與力微傳感器完成對位后,以LabVIEW軟件撰寫人機接口,由GPIB 傳輸接口完成計算機與個別儀器間連結,再透過個人計算機下達指令。交直流控制信號經電壓放大器放大后驅動致動器,致動器推動裝置于前端機構之荷重元與探針,施加微力于觸覺傳感器。在接觸的施力量測過程,可以獲得兩組輸出數據,一組為荷重元所量測得到的施力變化,可由荷重元電表上顯示出標準施力值。另一組為觸覺傳感器經由訊號處理電路所獲得輸出的電壓值變化。利用GPIB 傳輸接口,取得荷重元電表數據與示波器上之觸覺傳感器輸出電壓,進行實時訊號處理。整個量測過程中,可隨時由計算機屏幕上監控施力與觸覺傳感器輸出變化情形,并同步記錄靜態資料的保存檔案,完成測試步驟,驗證觸覺傳感器性能。
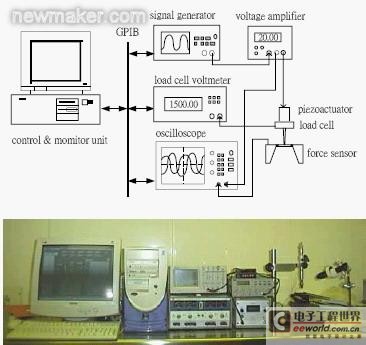
圖2. 微力實時量測系統
微傳感器實時量測人機接口操作顯示面板,如圖3所示,透過IEEE488.2通信協議,應用程序具備一套與個別儀器間量測操作聯系的指令,使用者可透過友善人機接口直接下達控制指令,輸出弦波、方波或三角波等測試訊號,亦可調變測試訊號的頻率與測試訊號振幅的大小,變化各種量測范圍,提供了靜態的單點量測與動態的連續量測功能。輸出與輸入間訊號波形的情形,則透過接口并行傳輸,達到實時的屏幕監控。藉由適當的調整取樣數、取樣頻率可獲得最佳取樣數據。數值變化經數據處理后,允許使用者實時由屏幕上,直接獲得量測后數據整理,如峰值電壓值、周期頻率及取樣點間連續量測所得的數值資料。靜態資料透過儲存指令,允許將量測到資料轉成文字文件,以便可匯入其它的軟件上使用。
3. 傳感器結果與討論
本研究分別針對壓阻式及壓電式觸覺微傳感器施予靜態與動態的正向力,藉由施力變化與觸覺微傳感器輸出響應之關系,校對驗證量測系統的功能。使用壓阻式觸覺力微芯片(SM5102-030-A),作為本實驗量測驗證測試。由控制單元輸出直流訊號經放大后驅動致動器,產生正向靜態作用力施于力微傳感器上。系統進行靜態作用力驗證,傳感器重復量測的輸出響應,如圖4 所示。經由重復量測結果顯示,儀器重復施力之可靠度佳,壓阻式觸覺傳感器的線性度約為3.1%VFS , 典型靈敏度約為13mV/g,電壓補偏值約為52mV,此可藉調節預力而降低之。
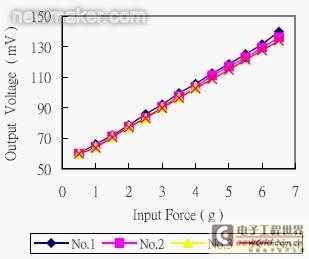
圖4. 壓阻觸覺傳感器之力與輸出電壓響應關系
使用PZT 壓電觸覺傳感器作為本實驗動態量測測試,由控制單元輸出測試訊號,經放大切換驅動壓電致動器,可供應連續動態施力方式。圖5 為1Hz 方波驅動訊號輸入時,壓電傳感器訊號輸出響應的情形,PZT 壓電傳感器受力時,輸出追隨著輸入動態訊號,產生頻率相同的電壓輸出響應,完成動態作用力驗證。藉由調整方波控制訊號大小,精確控制壓電致動器出力狀況,從而獲得量測與感測輸出的情形;控制訊號振幅的增量變化與作用力的關系實驗重復測試檢驗,輸入信號和荷重元PZT 壓電傳感器的輸出電壓關系示如圖6 所示,此為未經放大的響應。圖7 則為壓電訊號藉由電荷放大器放大200 倍后,作用力與壓電訊號之輸出響應情形,經由量測實驗輸出的結果,可分析壓電式微傳感器的線性度約為2.5%VFS,電壓補偏值約為4mV,典型靈敏度約為0.12mV/g,此組件靈敏度較差,可使用于作用力變化較大的環境。
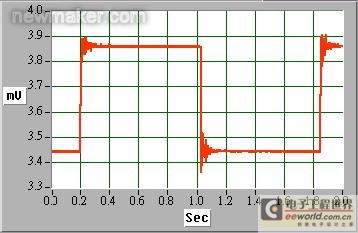
圖5. 壓電傳感器動態受力輸出響應實時顯示
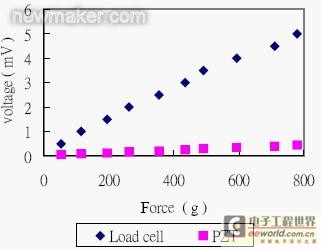
圖 6 . 壓電致動測試之荷重元量測與壓電感測輸出響應
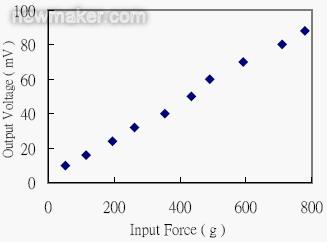
圖 7. 壓電觸覺傳感器之力與輸出電壓響應關系
4. 結論
在本研究中,我們研制出一套微力實時量測系統,其基本性能藉由壓阻與壓電觸覺感測組件測試輸出響應分析,完成微力測試量測系統的可用性和可靠度的驗證。壓阻微傳感器于靜態負載施力實驗測試時,可以精確量測到次毫克的微力變化。壓電感測組件于動態負載作用力下,系統藉由訊號的擷取與人機接口,可以實時觀察到訊號輸入的振動量與感測訊號輸出的情形,監視器可實時顯示擷取資料數值變化,相關量測信息可儲存于聯機計算機,作為后續研究之基礎;本套微力實時量測系統經由觸覺傳感器相互驗證,將對觸覺傳感器性能評估,得到一個更具可信度與臨床應用價值的發展。
References
[1] D. J. Beebe, D. D. Denton, R.G. Radwin, and J. G. Webster, “A silicon-based tactile sensor for finger-mounted applications,” Biomedical Engineering, Vol. 45, No. 2, pp. 151~159, 1998.
[2] D. J. Beebe, D. D. Denton, R. G. Radwin, and J. G. Webster, “A finger-mounted silicon tactile sensor,” Biomedical Engineering, Vol. 2, pp. 834~835, 1994.
[3] S. Omata and Y. Terunuma, “Development of new type tactile sensor for detecting hardness and/or software of an object like the human hand,” Solid-State Sensors and Actuators, pp. 868~871, 1991.
[4] R. A. Dickson, A. Petrie, F. V. Nicolle and J. S. Calnan, “A device for measuring the forces of the digits of the hand,” Biomedical Engineering, Vol. 7, pp. 270~273, 1972.
[5] C. Cristalli and M. R. Neuman, “A capacitive pressure sensor for measurement of interfacial pressure between a sphygmomanometer cuff and the arm,” Engineering in Medicine and Biology Society, Vol. 2, pp. 1547~1542, 1995.
[6] Y. Wang, C. Nguyen, R. Srikanchana, Z. Geng, and M. T. Freedman, “Tactile mapping of palpable abnormalities for breast cancer diagnosis,” Robotics and Automation, Vol. 2, pp. 1305~1309, 1999.
[7] K. G. Engelhardt, “Health and human service robotics,” Engineering in Medicine and Biology Society, pp. 2082, 1987.
下一篇: PLC、DCS、FCS三大控
上一篇: 一種具有遠程傳輸能力

型號:ML200PS1PC
價格:面議
庫存:10
訂貨號:ML200PS1PC

型號:ABH200PSC1B
價格:面議
庫存:10
訂貨號:ABH200PSC1B

型號:GLGD12D
價格:面議
庫存:10
訂貨號:GLGD12D

型號:19C003PG1K
價格:¥8000
庫存:10
訂貨號:19C003PG1K

型號:13C0500PA1K
價格:¥5500
庫存:10
訂貨號:13C0500PA1K

型號:SPT4V5000PS5W10
價格:¥7500
庫存:10
訂貨號:SPT4V5000PS5W10


