發布日期:2022-10-09 點擊率:65
隨著生產自動化水平的提高,人們對生產環節的監控水平的要求也越來越高,視覺檢測系統能滿足生產線上檢測的實時性要求,并且具有一定的柔性,精度適中,因此得到了廣泛地應用。一般來說,視覺檢測系統包括結構光傳感器、多線結構光傳感器、雙目視覺傳感器。本文主要討論多線結構光傳感器,即光柵式結構光傳感器。
1光柵式結構光傳感器原理
光柵式結構光傳感器是一種基于主動三角法的視覺傳感器。由光投射器在空間投射出一系列光平面,每個光平面通過攝像機建立與象平面間的透視對應,幾何結構如圖1所示。
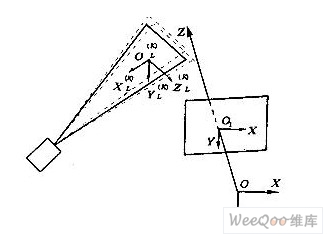
圖1光柵式結構光傳感器結構
在第K個光平面上以O(K)L為原點建立直角坐標系O(K)Lx(K)Ly(K)L,其它為攝像機模型結構。則有點的象面坐標與其在光平面坐標的關系如下:
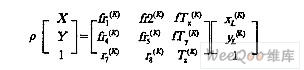
可見,若要求得點的光平面坐標必須知道點屬于哪個光平面。故光柵式結構光傳感器存在著光條的識別問題,通過光條編碼可以解決這個問題。
2結構光編碼
2.1結構光編碼問題概述
由于線結構光傳感器獲得的信息較少(只能獲得一個光平面內的位置信息),人們相應地開發了光柵式結構光傳感器和網格式結構光傳感器。但點的匹配問題也相應地出現了。
為了解決點的對應問題,人們將投射的光進行編碼。Altschulter[2]和Posdamer采用了激光光閘的編碼技術。128×128激光網格通過一個可編程的空間光調制器投射到物體表面,在象面上產生點陣模型。可編程的空間光調制器通過編程可以使某些激光束通過,而某些激光束被阻擋。通過對應于不同激光束的一系列圖像,可以解決點的對應問題。文獻提出了一種使用灰度碼的時間序列編碼方案。對于通常的三維靜態物體,這兩種方法能夠很好地完成點的對應,但對于動態實時的問題這些方法顯然不能使用。
對于動態實時的問題,我們希望有一種通過單一圖像即可解決點的匹配的方案。Boyer和Kav[6]使用一種彩色的光條,通過相鄰光條的顏色進行編碼。VySTeke和Oosterlinck[6]將一種方的模板投射到物體上,模板是通過二值化編碼的。Minarv[6]等人提出了一種基于三級灰度等級的網格式結構光的編碼方法。
從上面的討論可以看出,網格式結構光可以利用二維信息進行編碼,可利用的信息多,所以編碼問題比較容易解決。但網格式結構光傳感器不能進行特征點的精確測量。為了完成特征點的精確測量,我們采用光柵式結構光傳感器。因此,需要研究光柵式結構光傳感器的編碼方案。
2.2寬度編碼的可行性
對于光柵式結構光傳感器,我們利用光條的寬度信息進行編碼。要想利用光條的寬度進行編碼。必須確保等寬的光條在象面上投影的寬度比等于1或接近1。根據透視變換原理,由分析可知,對于f=25mm的透鏡,在工作距離為400mm時相鄰兩光條寬度投影變化不大,故根據光條投影的寬度進行編碼是可行的。圖2為將寬窄光條的寬度比作成2:1,投影在一個平板上,攝像機接收到的圖像,在象面上求得寬光條寬約20~25個象素,窄光條寬約11~15個象素。可見寬窄光條可以很容易地區分開。
圖2二進制編碼的光條圖象
3二進制編碼方法
3.1n位二進制編碼方法
圖3為結構光投射器原理,投射器模板的圖樣模式基本上決定了光平面和物體表面相交后的光條圖樣。光柵式結構光傳感器的編碼就是通過對模板上的圖樣模式編碼來實現的。
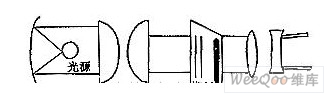
圖3光柵式結構光投射原理
在模板上刻一系列寬窄不同的兩種線條組成的圖案,該模板經投射形成的光平面和物體相交后形成的圖樣是一系列寬窄不同的光條。在模板上按二進制方式對圖樣進行編碼。用“0”表示窄光條,用“1”表示寬光條。將所有的光條按順序分組,每組對應一個序號,用一個二進制碼表示每組的序號,該二進制碼和該組的圖案相對應。例如用三位二進制碼表示每組的序號,序號為4的那一組用二進制碼“100”表示,相應的線條圖案為“寬”、“窄”、“窄”。假設用n位二進制碼表示每組對應的序號,則線條模式共有2n個分組,于是最多可以對n.2n個光條進行編碼。圖4給出了一個用三位二進制編碼的模板圖樣。
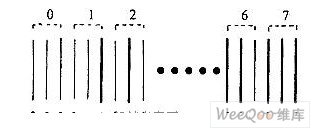
圖4三位二進制編碼圖樣
對經過二進制編碼的光平面識別是簡便的。首先,對攝像機接受到的光條進行處理,根據光條的寬窄將光條譯成由二進制碼組成的序列,然后根據編碼規則將得到的序列分解成組,最后識別出每一個具體的光平面。需要指出的是,由于被測物體表面尺寸和攝像機視場的限制,攝象機獲得的光條數一般來說總是小于投射器投射的光平面數。
例如,采用二位二進制碼對攝像機接受的光條處理后得到“001101”,按二位一組對該序列進行分組,只可能有兩種結果:“00”“11”“01”和“0”“01”“10”“1”。前者對應的分組序號為0、1、3這顯然是與編碼規則相矛盾的。后者對應的分組序號為未知、1、2、未知,這是符合編碼規則的。據此可得到前面的未知光條為0分組第二根光條,后面的未知光條為3分組第一根光條。可見,視場中的每根光條都可以有效地識別出來。
對于表面法向基本不變或變化很小的物體,由文獻[1]可知,將寬窄光條的寬度比做成2:1,即可以非常有效地將寬窄光條區分開來。記threshold1=1.5,threshold2=0.6。則若Δ1/Δ2>threshold1=1.5,可判斷1為寬光條,2為窄光條;若Δ1/Δ2Δ1/Δ2的值,直到出現前兩種情況,我們就可以判斷出光條到底為寬或窄。(Δ1/Δ2分別為光條1、2在象面投影的寬度)。
3.2偽隨機序列編碼方法
前面講的n位二進制編碼方法可以對n.n2個光條進行編碼。當n增大時,能夠編碼的光條數增加很快。但是,我們衡量一種編碼方法優劣的主要標準是解碼所需信息的多少,解碼所需的信息量越少越好。
在n位二進制編碼中,為確保能夠正確譯碼,至少需要接受到3n-1個連續的光條。對于n=4的情況,能對64個光條進行編碼。但要正確譯碼,則至少需要接收到連續11個光條。現在我們要考慮的問題是能否盡量減少譯碼所需的光條數。研究發現:M序列[7]能夠使譯碼所需的信息減少。
下面先來講述M序列的構成。設一無限長二元序列各元素之間存在下列關系:
Xi=a1Xi-1a2Xi-2…apXi-p(2)
其中:i=p+1,p+2,…,系數a1,a2,……,ap-1取值0或1,系數ap總和為1,表示模2的和。
只要適當地選擇系數a1,a2,……,ap,就可以使序列以(2p-1)bit的最長周期循環。這種最長周期的二值序列就稱為M序列。
取X4=1,X3=0,X2=1,X1=0,
令Xi=Xi-3Xi-4則可得X15,X14,……X1如下:111100010011010。我們發現對于任意連續的4個x,其二進制值均不相同,故只要知道了任意連續的4個x,即可知道這組x在序列中所處的位置,從而進行有效的譯碼。
對M序列譯碼所需的信息比n位二進制碼少,當p=6時,可以對63根光條進行編碼,這時在視場中只要看到連續的6根光條即可進行譯碼;而對于n位二進制編碼如果對64根光條進行了編碼,譯碼則需要11根光條。
用二維數組a[15][4]存放每相鄰4根光條的編號。例如,第12、11、10、9根光條其二進制表示為1000,則a[8]={12,11,10,9};第8、7、6、5根光條,其二進制表示為1001,則a[9]={8,7,6,5}。假設我們得到連續的4根光條二進制表示為1001,則通過查數組a的第9行,得到這4根光條的序號分別是8、7、6、5譯碼完成。
可見,通過光柵式結構光傳感器的編碼在一定程度上解決了光條的識別問題,提高了傳感器的使用范圍。若物體的表面有些地方法向變化非常劇烈,按照上面的方法需將寬窄光條的比值做得很大,而為了保證光條中心的計算精度窄光條又不能做得太窄,若單單通過提高寬窄光條的比值,必然導致視場中的光條急劇減少。由于法向變化非常劇烈的地方是很少的,通過糾錯編碼技術就可以將光條的寬度局部反轉的地方糾正過來,使問題得到解決。
下一篇: PLC、DCS、FCS三大控
上一篇: 基于傳感器數據采集的
型號:RE46C140E16F
價格:面議
庫存:10
訂貨號:RE46C140E16F
型號:APDS-9008-020
價格:面議
庫存:10
訂貨號:APDS-9008-020
型號:APDS-9309
價格:面議
庫存:10
訂貨號:APDS-9309
型號:APDS-9309
價格:面議
庫存:10
訂貨號:APDS-9309

型號:BH1750FVI-TR
價格:面議
庫存:10
訂貨號:BH1750FVI-TR
型號:NORPS-12
價格:面議
庫存:10
訂貨號:NORPS-12


